3年生対象の学科のオムニバス授業のひとつに「情報システム学実験1・2」があります。5人の教員が3週ずつ担当し、1週あたり3コマという構成です。シラバス検索の科目名欄に「情報システム学実験1」と入れると当該授業の情報が出ます。私の担当は「ESP32とGPSユニットを使ったシステム作成」となっていますが、特にGPSが必須というわけではなく、2~3名のグループに分かれて自由にマイコンシステムを作るという授業になっています。この授業を5月下旬から6月上旬にかけて実施しました。
2018年入学生のカリキュラム改定時にスタートしたこの科目は、2020年が最初の年でした。私の担当会、最初はESP8266を使っていましたが途中からESP32にシフトしました。Bluetoothシリアルが使えるようになって学生が作るものの幅が広がった感じです。各グループに配るESP8266のピンヘッダの色を赤、青、黄、黒にしていたことから、グループ名は「チームレッド」「チームブルー」「チームイエロー」「チームブラック」と命名することにしています。今となっては何の色なのか学生も不思議に思っているかもしれません。
各グループで制作に励んでもらい、最後の時間にプレゼンテーションをして終わり、という授業形態なのですが、条件として「無線機能を使うこと」を指定しています。なにかしらのセンサーから得た値を離れたパソコンやスマホで確認するとか、その後のアクションをアクチュエータやモータで実行するとかそういうシステムを自由に作ってもらうのです。
今年は、以下の4つのシステムが作られました。
- チームレッド:親指の位置に圧力センサを埋め込んだグローブを使って、マッサージの強さを無線で飛ばし、パソコンのプログラム側で「ちょうど良い強さ」を教えてくれるシステム=「Massage Master」フェルトを縫ってグローブを作ってくれていました。
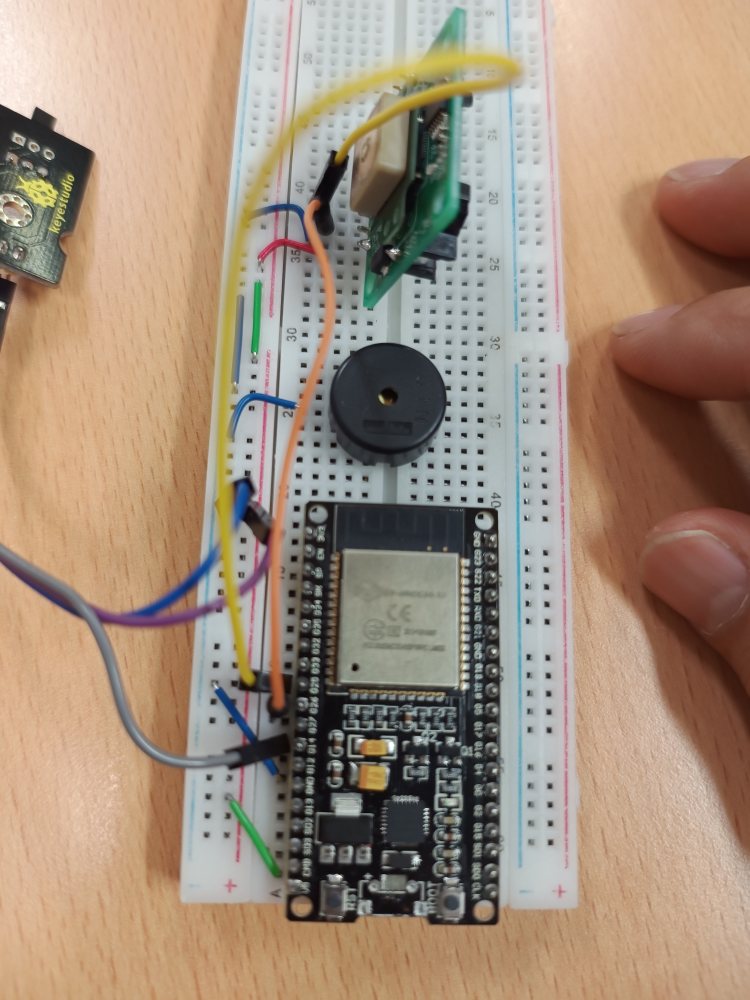
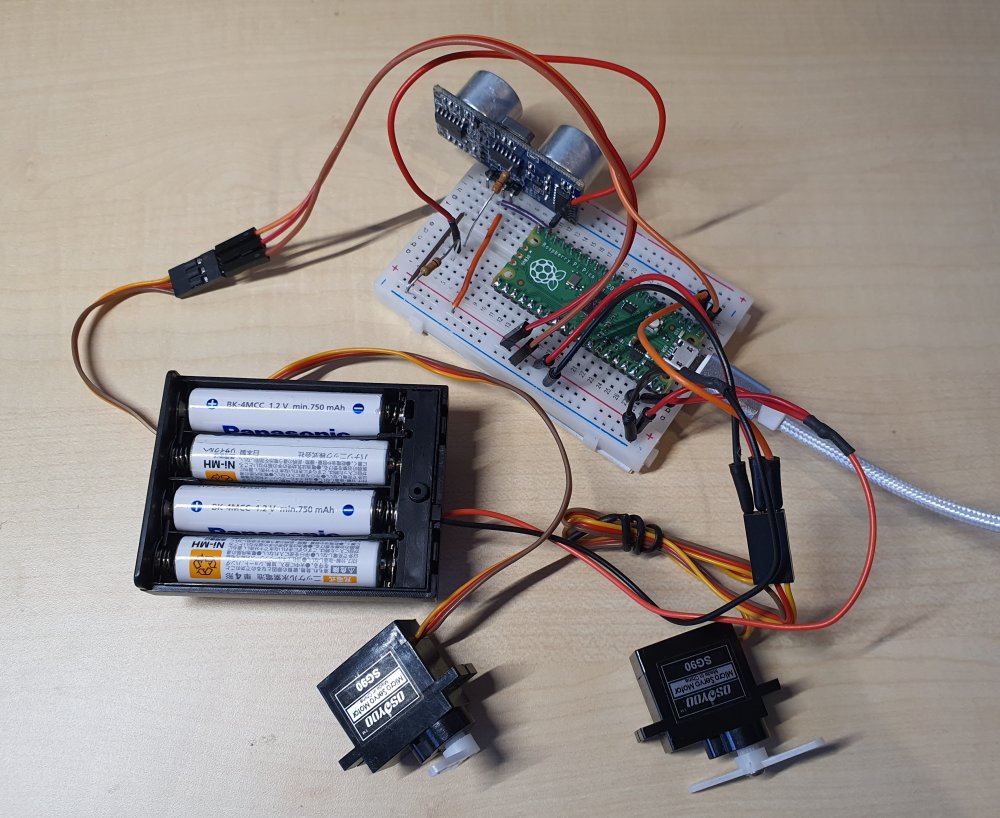
- チームブルー:傘が開いているかどうかをマグネットセンサで検知して、GPSのデータと共に「どこで傘が開かれているか」のデータを集めることで実際の雨の様子を集約・確認するシステム。実際には開閉センサの状態と、GPSの位置情報を送信して受信する、というものを実装してもらっています。
- チームイエロー:Qrio Lockのようなスマホから開錠する電子錠。ESPを親機にして、スマホのブラウザから操作することでステッピングモータを回すようなものです。
- チームブラック:椅子に設置した赤外線距離センサと、首のあたりにつけた加速度センサから「座っている姿勢の良し悪し」を検出してスマホに通知するシステム。ESPを2台使って相互通信し、1つをWebサーバにしてスマホと接続していました。
最後のプレゼンテーションの時間には、動画や実演などを交えた発表がなされました。ちょうど来学していた外部の研究者5名の方々にも参加して頂けたことで、学生たちにも刺激になったと思います。
上の写真はチームブルーのブレッドボード。マグネットセンサの状況をブザーで教えてくれつつ、GPSの緯度経度情報を発信します。
実はGPSユニットは毎回トライするグループは苦労します。新旧混ざった情報が溢れているうえ、窓際でもできなくはないのですがしっかり電波を補足するには屋外に出なくてはならず、そして屋外に出るとパソコンの画面が見えづらく、弱視学生には厳しい。通信系のソフトウェアはどこがうまく動いていないのか特定しにくいということを体験してもらうのも本実験の主旨のひとつなのですが、GPSを利用すると更にその不確定要素が増えるというわけです。