under construction!
はじめに
今年のSIGACIワークショップ in ヒューマンインタフェースシンポジウム2022は、いつもと変わらず(?)ハードウェアシステムネタです。2022年3月の京都研究会にて↓の動画をお見せしつつ「とても簡単にできる」と言い切ってしまったため、MediaPipeと無線マイコン・サーボを組み合わせた「ヒトが動くとサーボも動く」というものを作ってみたいと思います!
本ワークショップでは簡略化して1つだけ動かしてみようと思います。
機材・材料
- パソコン(ご持参ください。このページの解説はWindowsを想定しています)
- 以下のものはSIGACI側で用意する予定です。
- ESP-WROOM-32
- サーボ(SG90)
- ブレッドボード
- 電池ボックス(先端をジャンパピン仕様にしています)
- ジャンパワイヤ×3本(サーボ接続用です)
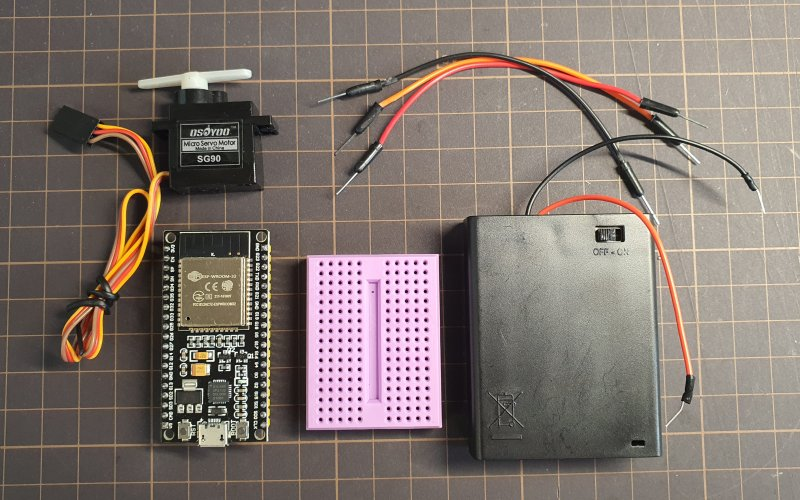
ブレッドボードは170穴のものです。利用時にESP-WROOM-32の脚がはみ出すため、上下端の穴が上端・下端に寄っているものにしています。ワークショップ関係なく本ページをご覧になって試してみる場合、Amazonなどで入手できるものは穴と上下面との距離があったりするので注意してください。はみ出した脚が曲がる可能性があります。(ただ、ショートしなければ曲がっても特に影響はありません…)
当日までの下準備
ワークショップ参加者の方々は、実施予定日までに以下の内容を各自で進めておいてください 。よろしくお願いします。
- pythonのインストール
- pyserialライブラリも入れておきます。
- OpenCVとMediaPipeのインストール
- サンプルコードでの動作確認までを済ませておいてください。
- arduino.exeのインストール
- ESP32のボード情報とサーボライブラリのインストール
加えて、下記「当日行う内容」のデバイスドライバファイルのダウンロードとサンプルの「お試しコンパイル」だけしておいて頂けると当日の進行がスムーズになるので助かります。
当日行う内容
- ESP32をUSBで接続して、デバイスドライバのインストールを行う
- ESP32とサーボを接続する
- arduino.exeのサンプルコードを動かす
- サーボを動かすだけのサンプル
- シリアルポート経由で角度を指示するサンプル
- Bluetooth接続してみるサンプル
- MediaPipeから角度を検出してみる
- 検出された角度情報をもとにサーボを動かす
- 自分のアイディアで「体の動きをサーボに伝えるシステム」を作ってみる。
- おしまい
- おまけ
当日、楽しんでいただけることを祈っております…